Embodied Data Ecology
Capture high-fidelity interaction streams across robots, humans, objects, and scenes.

Robot · Human · Object · Scene
Building next-generation physical large models from embodied data, causal world models, and robot deployment feedback.

Driven by the first-principle conviction that Embodied Intelligence is the essential path to AGI, RhOS studies the intersection of digital intelligence and physical reality.
Our RoboNet framework treats robots as intelligent data interfaces, shifting learning from static offline datasets toward dynamic Physical AI powered by automated, online intervention.
Capture high-fidelity interaction streams across robots, humans, objects, and scenes.
Learn actionable models that connect perception, contact, force, intent, and action.
Deploy, intervene, evaluate, and feed real-world outcomes back into model improvement.
A real-time multi-agent world model with shared state and synchronized multi-view generation.

Implicit physical-causal world models that look ahead across 1,000+ physical worlds.
Project
A real-world task suite for evaluating physical robustness and embodied generalization.
Project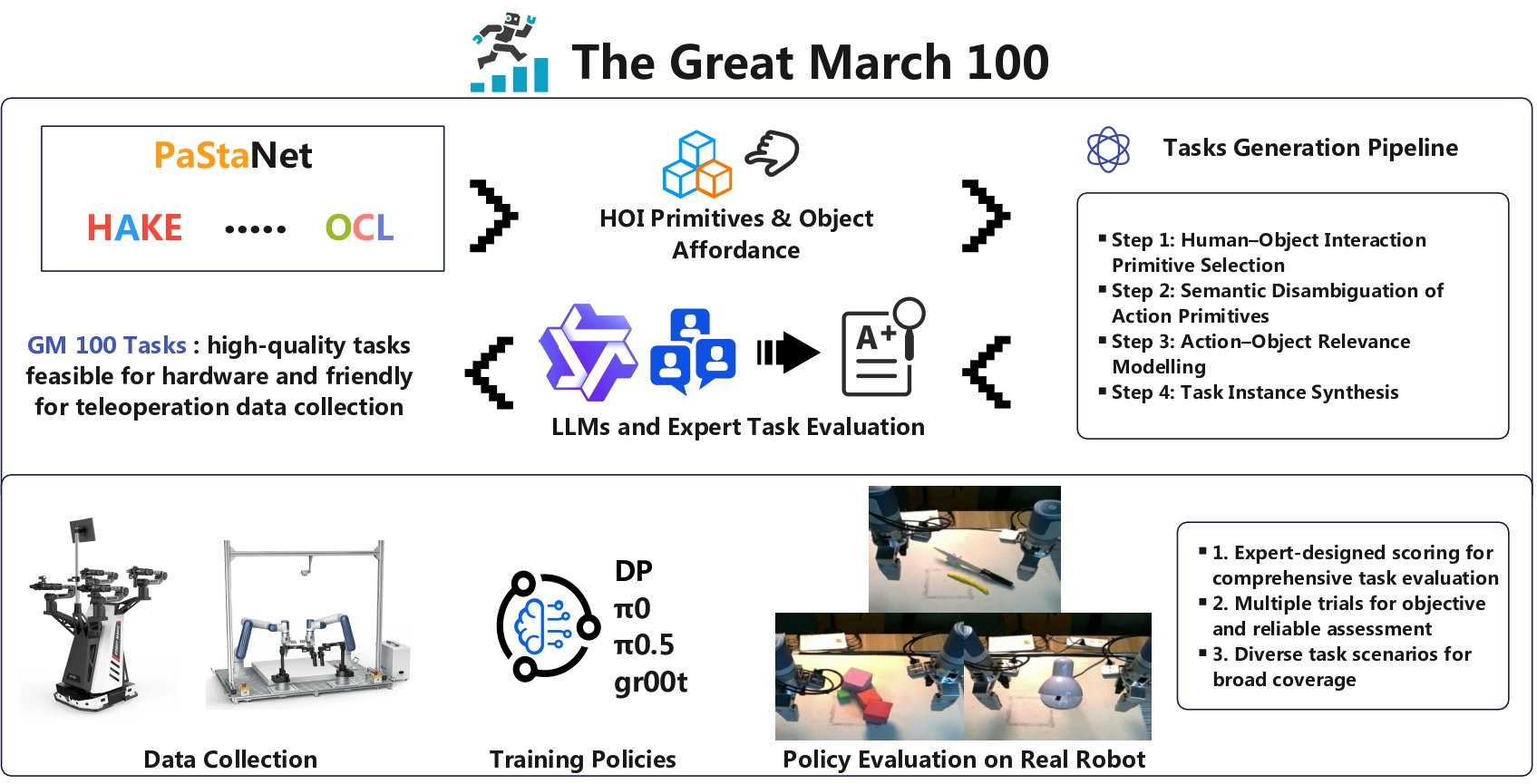
An arm-worn robot teaching system for force-guided vision-tactile learning.
Project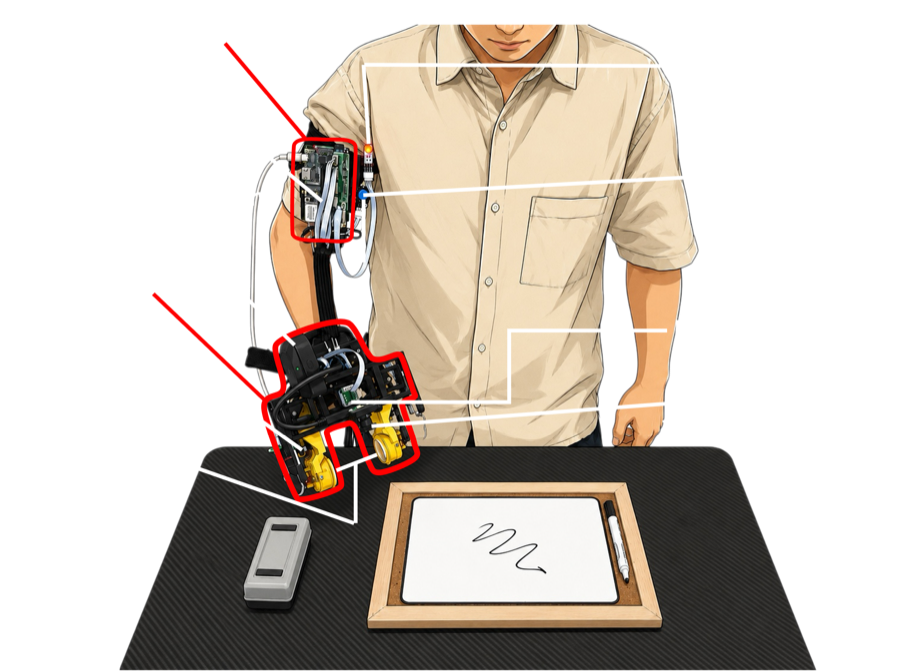
RhOS builds a critical bridge between human-centric generative AI and the rigorous demands of physical environments. By fusing simulated experience with high-fidelity spatiotemporal data from real-world interactions, we work toward zero-shot generalization for unseen robots and unseen tasks.
RhOS brings together world modeling, embodied data, motion control, and robotic hardware to develop systems that learn from real physical interaction.
We focus on the full feedback loop: collect, model, deploy, evaluate, and improve.
World models · Data systems · Motion control · Hardware
Open roles