Khora
Khora is a real-time multi-agent world model with shared state and synchronized multi-view generation, scaling many independent observers inside one evolving world.

RhOS studies physical reasoning, robot learning, embodied world models, and evaluation protocols for systems that operate in contact-rich real-world environments.
Khora is a real-time multi-agent world model with shared state and synchronized multi-view generation, scaling many independent observers inside one evolving world.
An arm-worn robot teaching system for force-guided vision-tactile learning, designed to capture richer physical interaction signals for robot policy development.
Project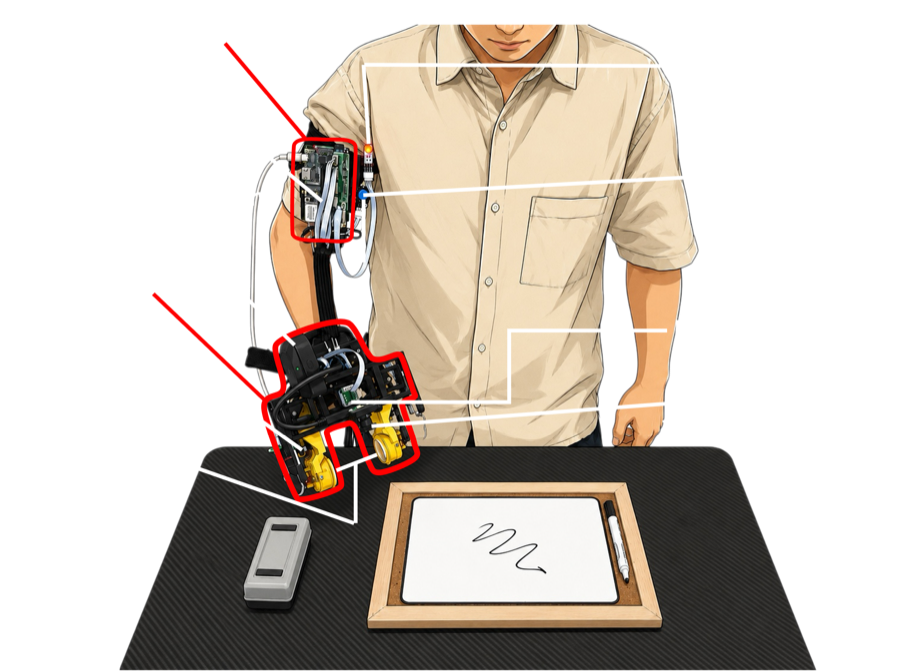
GM-100 is a foundational task list for evaluating embodied AI systems in real-world settings, focusing on tasks that expose physical robustness and generalization.
Project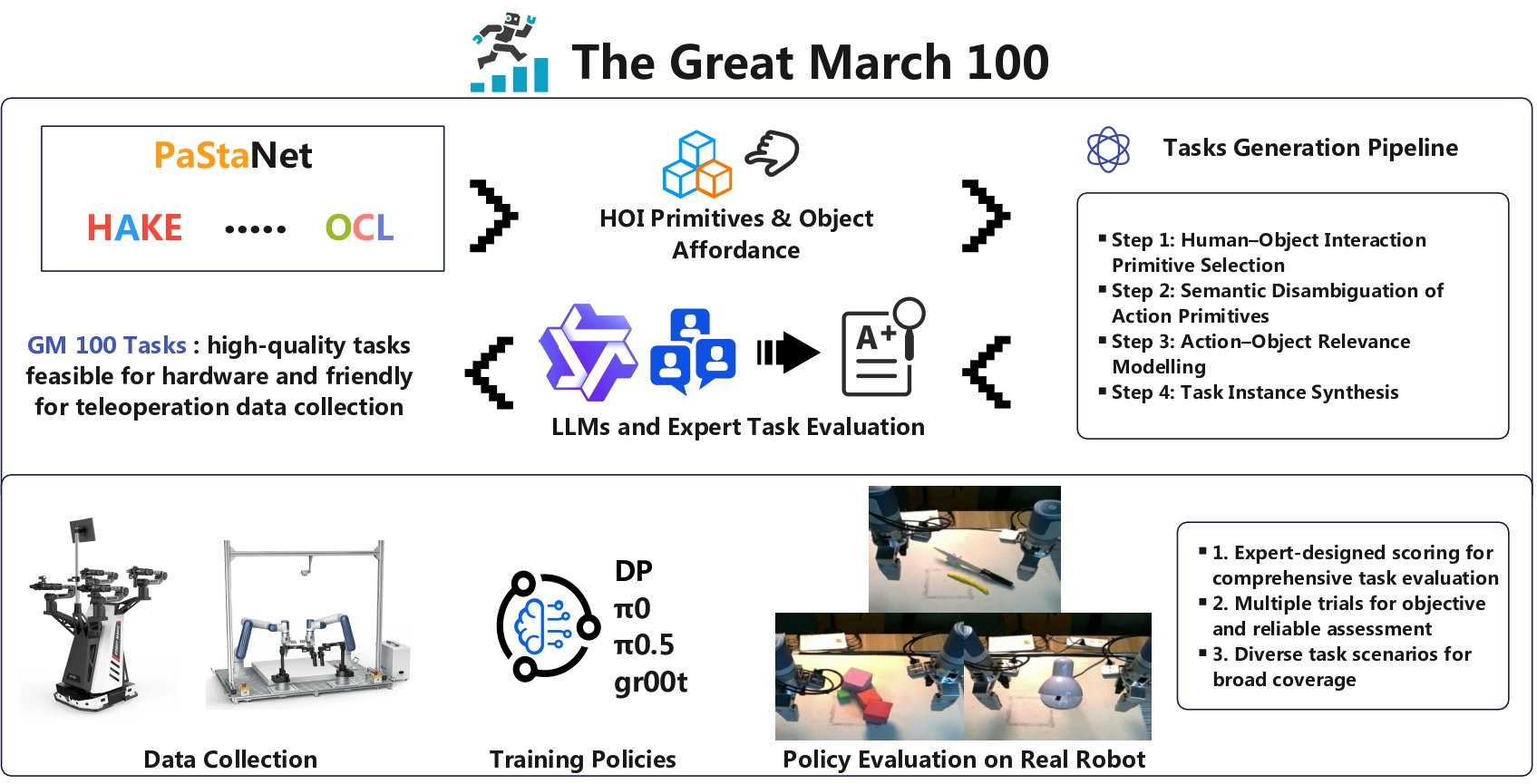
IPR-1 is an implicit physical-causal world model that can look ahead across 1,000+ physical worlds within one model, studying how interactive experience can scale physical reasoning.
Project